双目视觉与跨 Task¶
双目+跨 task 功能应用举例。
创建双目图像源并进入双目标定¶
创建双目图像源¶
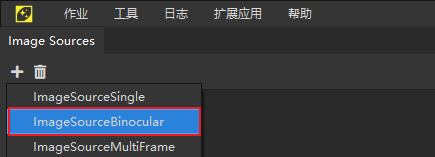
进入相机界面,找到 Image Source 模块,点击"+"按钮,选择 ImageSourceBinocular。
操作步骤¶
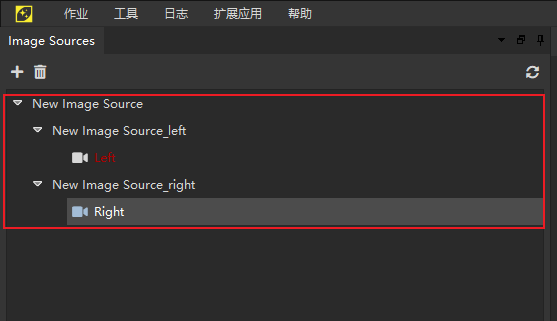
- 创建 2 个虚拟相机(或绑定 2 个物理相机)并命名 Left 和 Right
- 分别绑定 Left 和 Right 到双目图像源中的对应 New Image Source_left 和 New Image Source_right 中(绑定方式与单图像源中图像源与相机绑定操作一致)
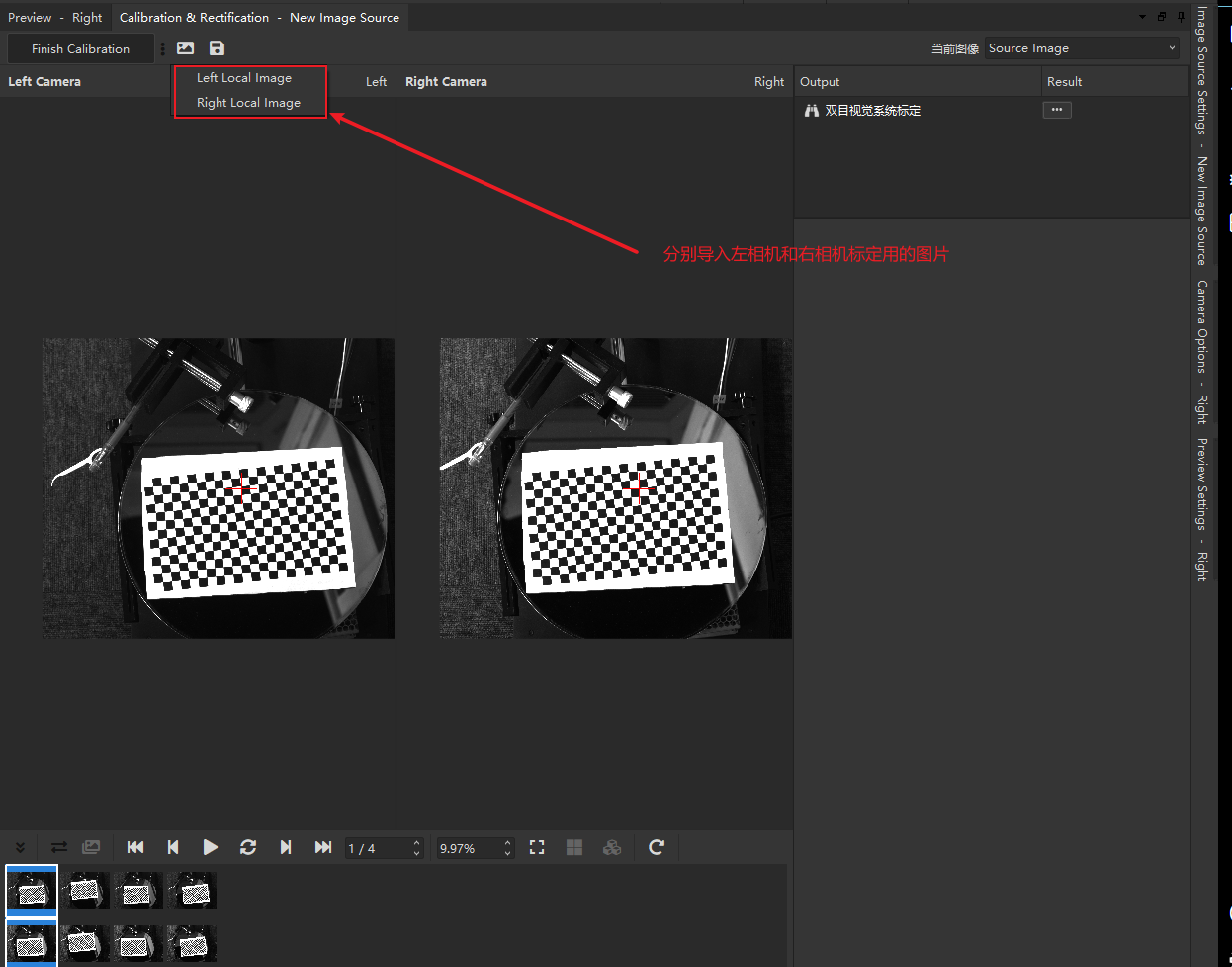
- 进入双目标定模式,分别导入左相机和右相机标定的图片(需要注意图片顺序,对应关系)
- 设置标定参数,依次选中图片,添加标定帧,点击更新标定,完成标定
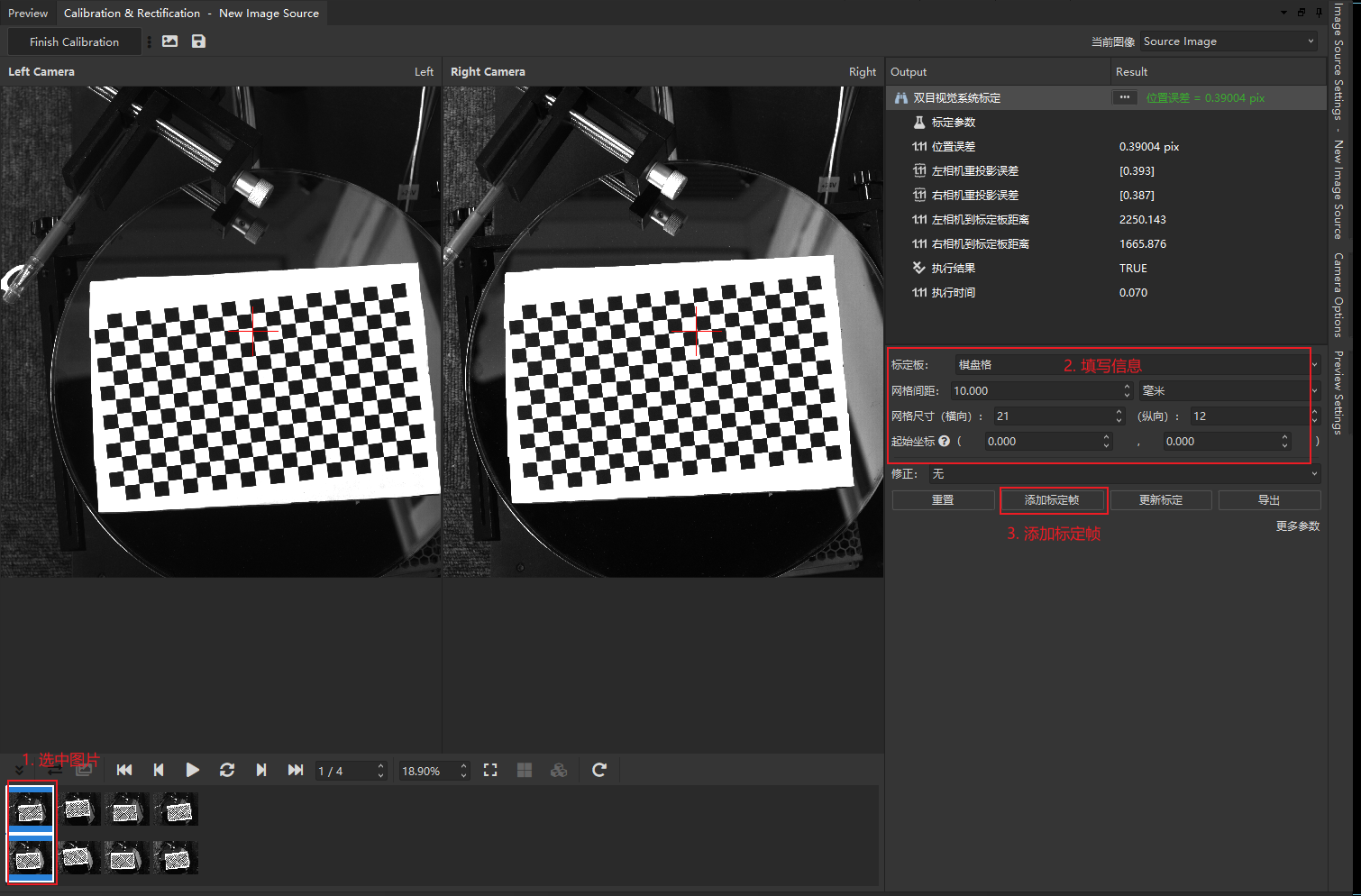
- 结束标定
双目图像源与 task 的绑定¶
操作说明:新建 2 个 task,分别命名为 Left 和 Right,并分别绑定双目图像源中的 New Image Source_left 和 New Image Source_right。
跨 task 配置¶
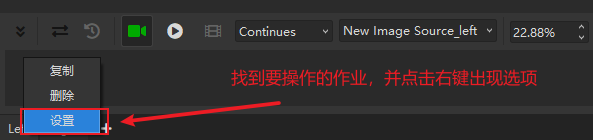
开启跨 task 模式,设置作业信息,选中 task 并右键点击出现选项如下:
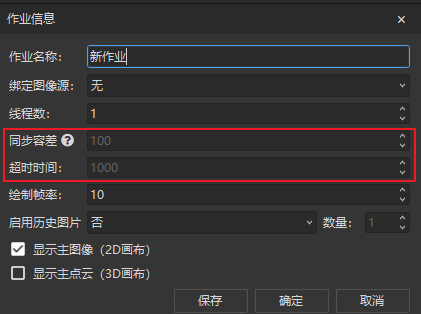
设置同步容差和超时时间¶
跨 task 配置¶
参数说明¶
- 线程数:作业线程数量,取值范围 1~4
- 跨 task:勾选时开启跨 task,不开启时作业单独运行
- 同步容差:取图的帧抖动时间 * 2 < 同步容差 < 取图周期 * 0.5。即当帧抖动为 ±10ms,取图周期为 100ms 时,同步容差的可设置范围为 20~50ms。若将同步容差设置为 30ms,则取图时间点相差小于 30ms 的两张图将被视为同一组图片。取值范围 10~10000
- 超时时间:跨作业时的等待结果的最长时间,取值范围 10~100000
- 绘制帧率:限制 UI 刷新次数,取值范围 1~20
作业配置说明¶
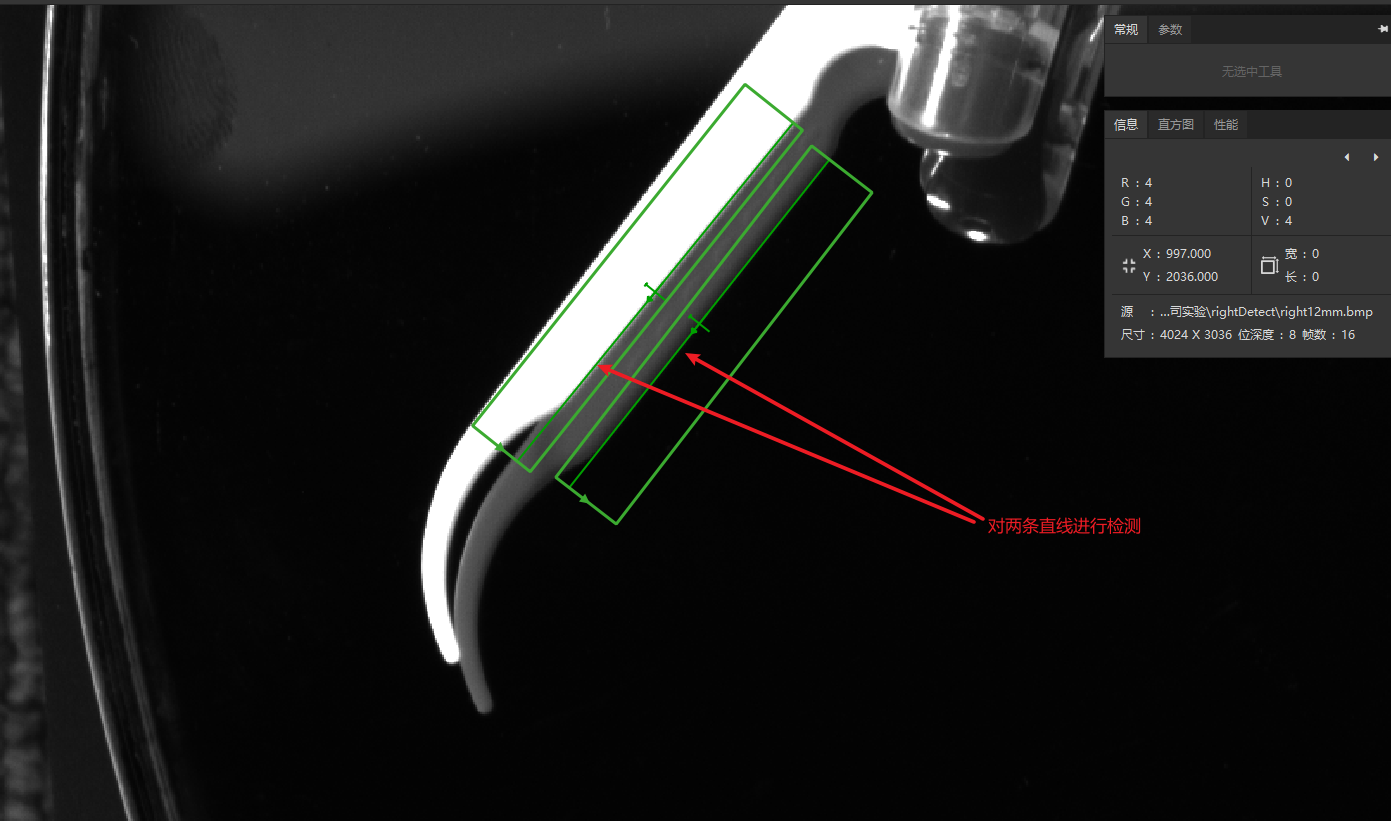
检测要求:验证抬高距离(其中物理测量距离为 12mm)。
实现思路¶
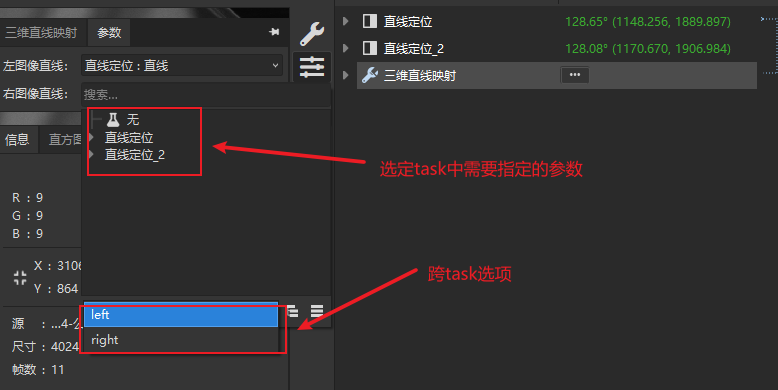
使用双目标定后,对左右相机拍摄的同一位置进行对应检测(需要用到跨 task),计算抬高距离。
- 使用三维直线映射工具获取直线场景坐标(需要对应左右相机的检测位置,确保检测同一物体、同一位置)
- 计算 z 轴距离,按照实际测量值,在 12mm 左右则验证完成
物理相机的添加与调参¶
添加物理相机¶
选择要添加的相机类型(以海康为例,前提条件:本地物理环境已经连接一个物理相机并在同一网段),点击刷新按钮。
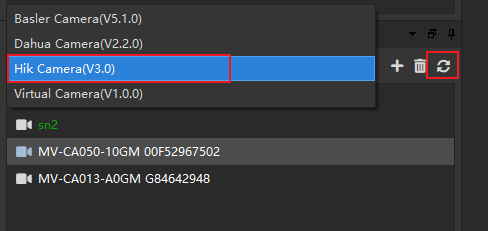
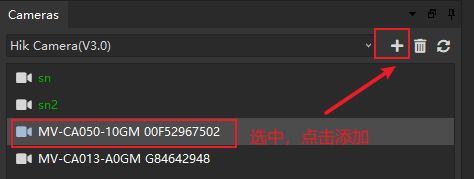
列表会出现可以检测到的相机列表,选中要添加的相机,点击添加按钮。添加完成后,相机的列表里已经添加的相机会有颜色标识。
取图与调参¶
双击相机,在预览界面打开相机,进入取图模式:

设置相机参数:
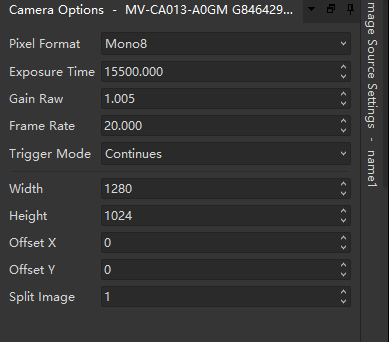
参数说明¶
- Pixel Format:图像格式
- Exposure Time:曝光
- Gain Raw:增益
- Trigger Mode:触发模式
- Split Image:拆图