标定功能¶
在工业应用领域,通常需要把相机拍摄到的像素坐标转换为物理坐标,而标定可以帮助完成这件事情。本章节介绍不同的标定方式,可以根据自己的需要选择适合项目的标定方式。
多点对标定工具¶
多点对标定工具基于输入的图像点与场景点间构建的变换矩阵,用于标定相机参数,建立其与物理世界的联系。
当前版本提供了三种不同的多点对标定工具,以适应不同的应用场合:
- 四点标定:最简单,需要输入 4 组图像和场景点对
- 九点标定:提供相对更精确的标定结果,需要输入 9 组图像和场景点对
- 单点多帧标定:更为灵活,可逐帧添加单组图像和场景点对,最终结果将联合考虑所有输入的点对。点对的总数没有上限,但至少需要输入 4 组图像和场景点对
理论上,点对数量越多,得到的结果越精确,也越鲁棒。
变换矩阵¶
当前版本支持 3 种变换矩阵形式,可从中选择一种最接近实际场景的形式:
- 硬变换:仅支持平移、旋转,仅在确定图像和场景坐标系处在同一尺度下时使用
- 仿射变换:支持平移、旋转、缩放和斜切,仅在确认相机俯仰极小(或已经矫正)的前提下使用
- 射影变换:支持所有变换自由度,包括平移、旋转、缩放和透视投影。这是配置的默认值
基于点对的标定工具不支持镜头畸变的标定和矫正,如需标定镜头畸变,需要添加额外的网格标定工具作为前置工具,再基于网格标定的矫正图像,定位图像点坐标。
相机标定流程¶
- 找到合适规格的标定板,并将其固定在一个稳定的平面上(常见如棋盘格、二维码棋盘格、散点棋盘格、圆点等)
- 通过调整标定物或者摄像机的方向,为标定物拍摄一些不同方向的照片
- 从图像中提取棋盘格的交点
- 估算无理想畸变的情况下,五个内参(相机畸变)和六个外参(RT 矩阵)
- 应用最小二乘法估算实际存在径向畸变下的畸变系数
- 极大似然法,优化估计,提升估计精度
- 对标定结果进行评价
- 查看标定效果
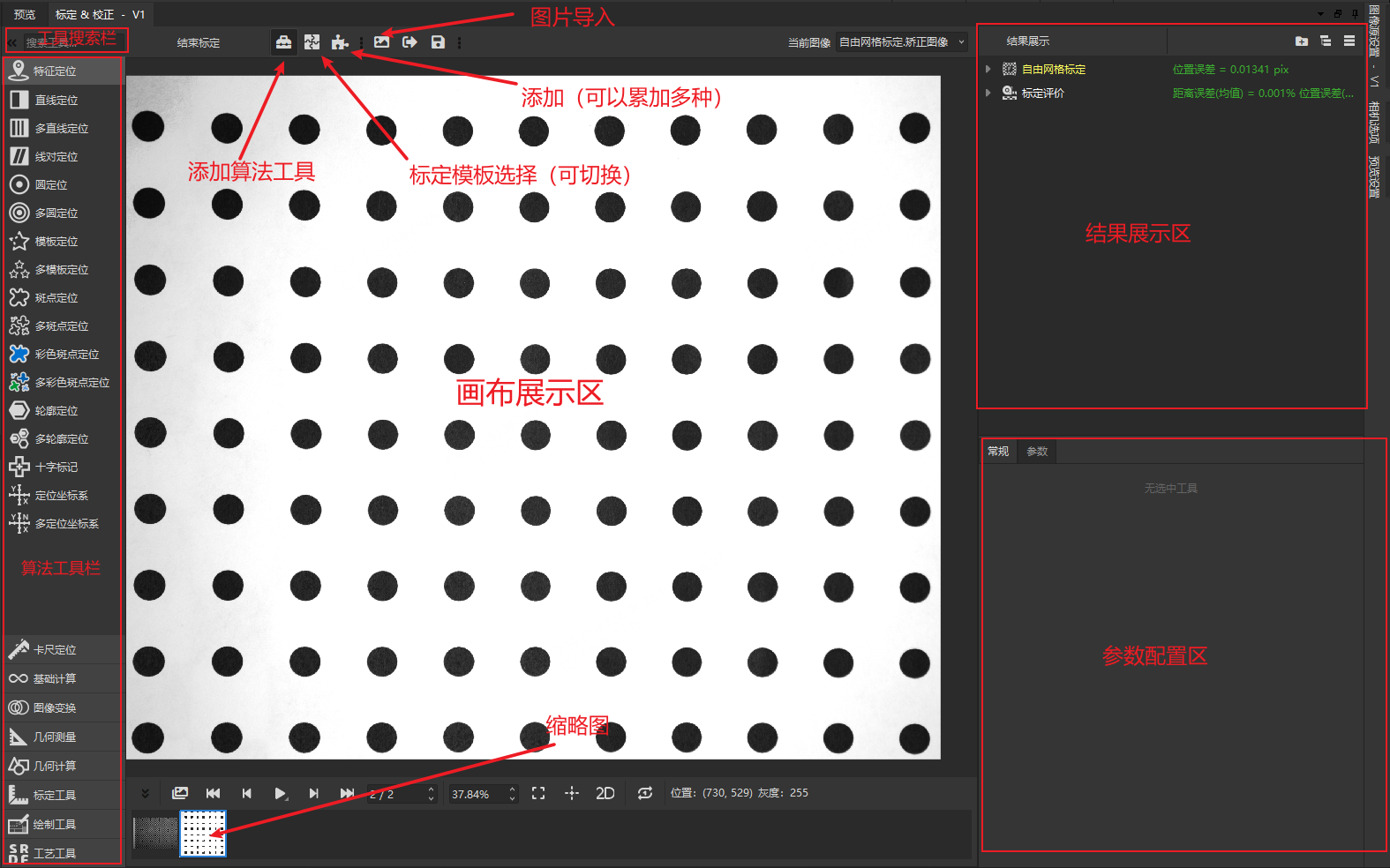
界面说明:
四点 / 九点 / 多点标定¶
前提:创建了单图像源并绑定了相机(此部分前置步骤请到图像源创建部分查阅)。
操作步骤¶
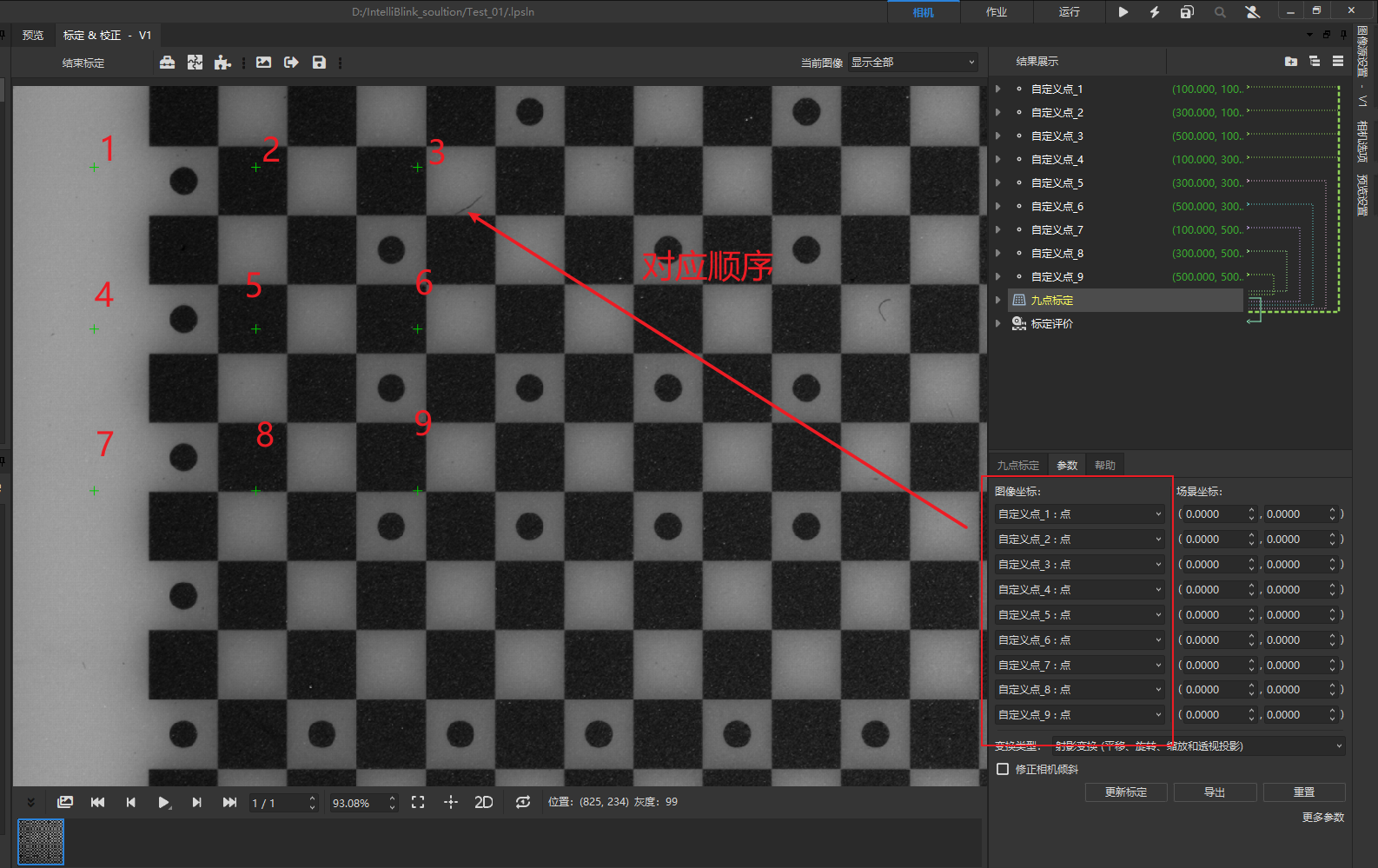
选择需要标定的图像并导入(或者用相机采集图片亦可),选择标定模式 - 四点标定(九点标定):
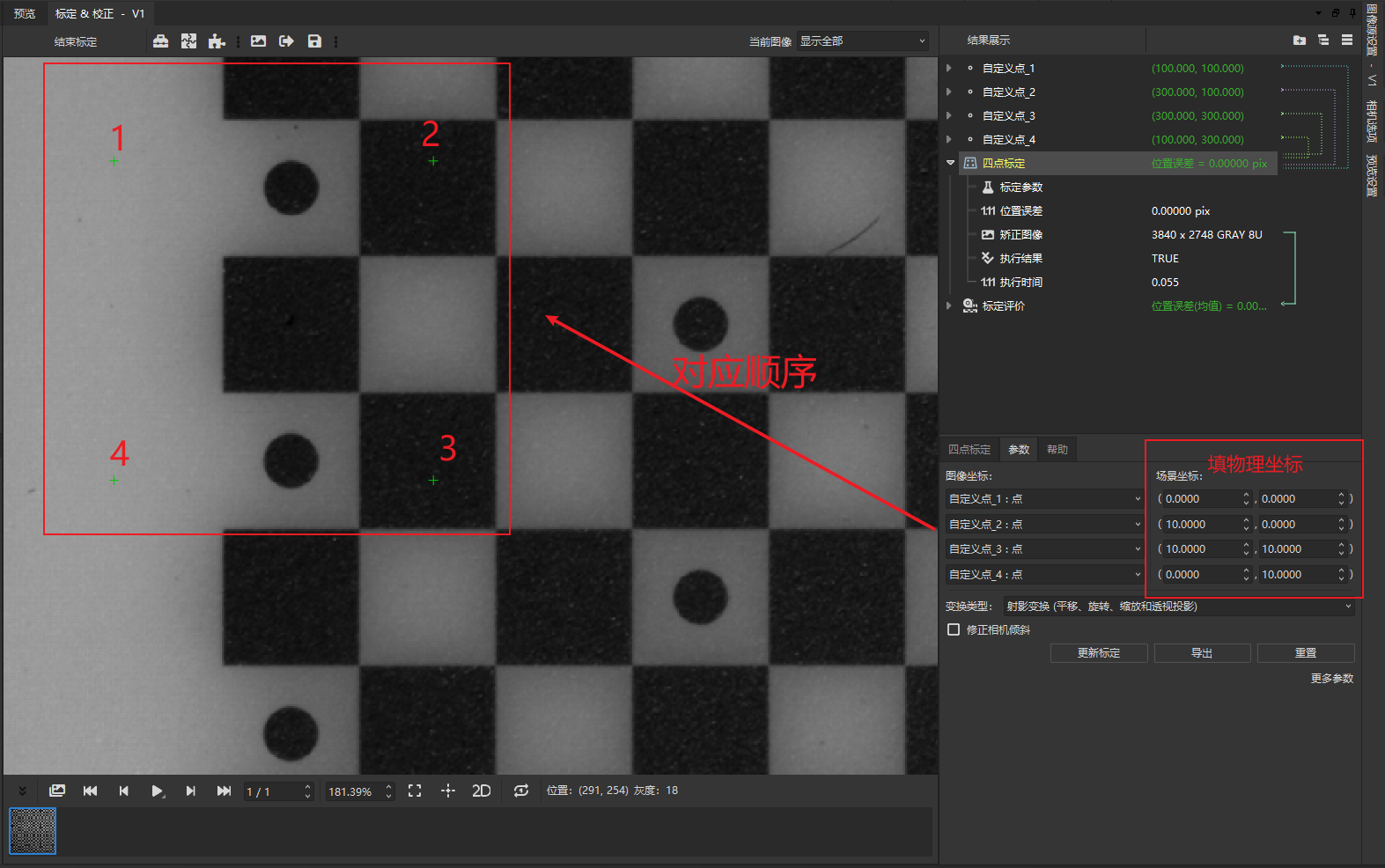
输入物理坐标,执行标定。标定成功后会出现标定成功的提示,点击结束标定退出标定界面。把标定后的图像源绑定在 task 中时,会按其物理坐标进行显示。
多点标定操作类似,不再赘述。
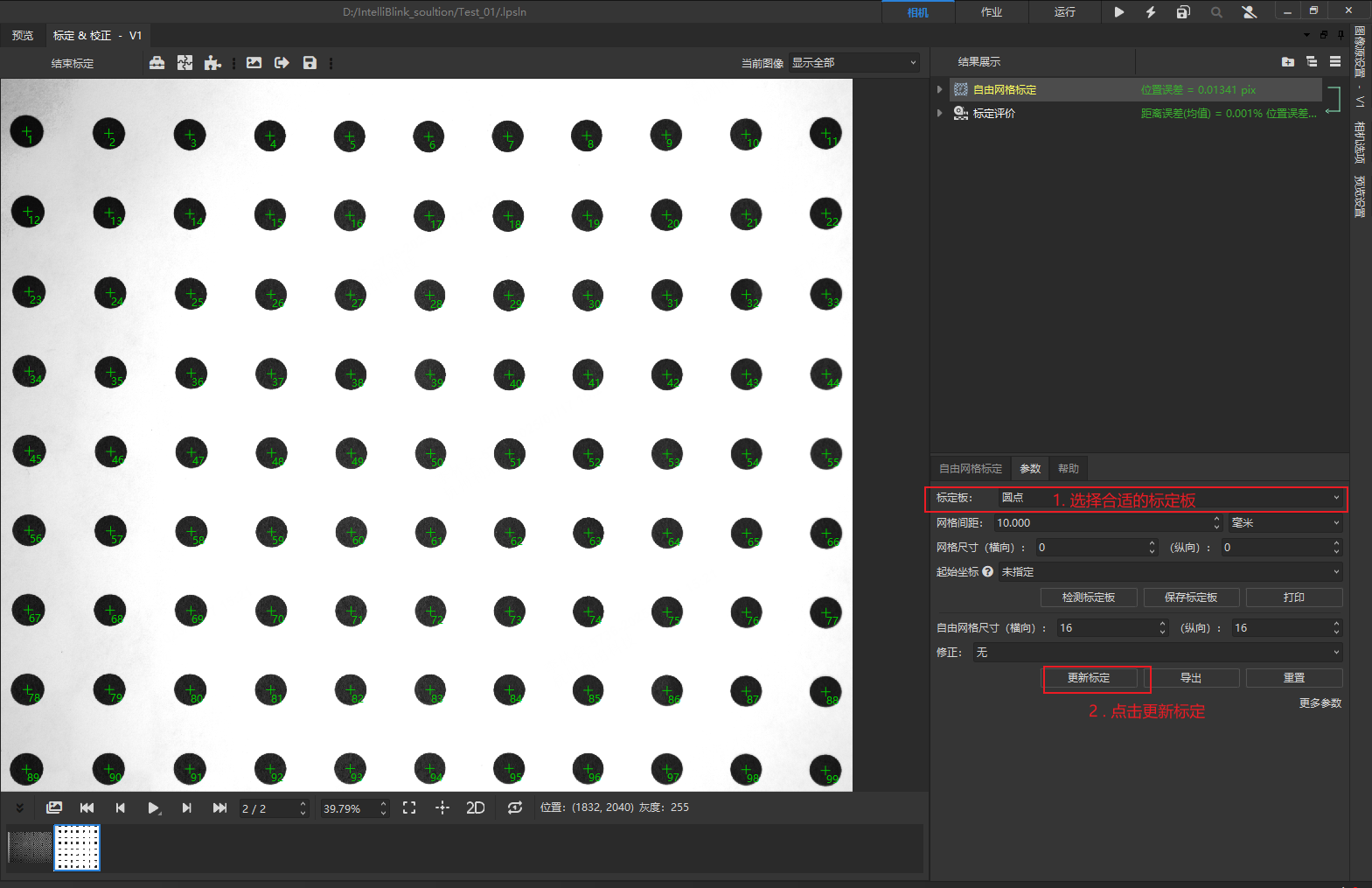
自由网格标定¶
导入要标定的图像,并在参数设置部分选择正确的标定板,点击更新标定。
注意:3.8 以上的版本相较于以前的版本做了标定部分的优化,不再需要用户输入尺寸信息。
在当前图像部分可以设置画布显示,可以选择显示全部或原始图像,以及矫正图像。
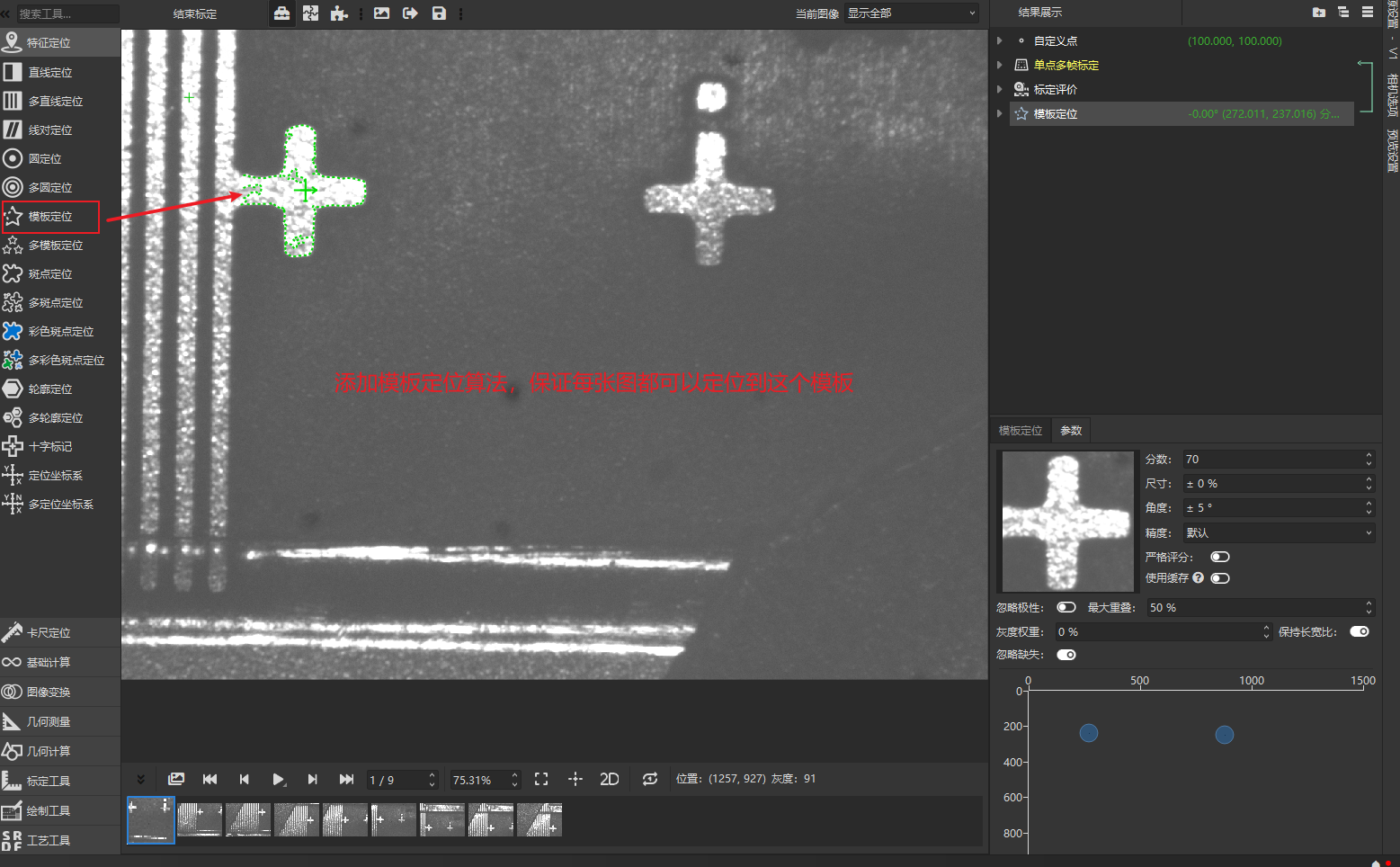
单点多帧标定¶
使用单点多帧标定可以自定义运动轨迹,在图像上选中一个模板点,作为标定的图像坐标,并添加点对。
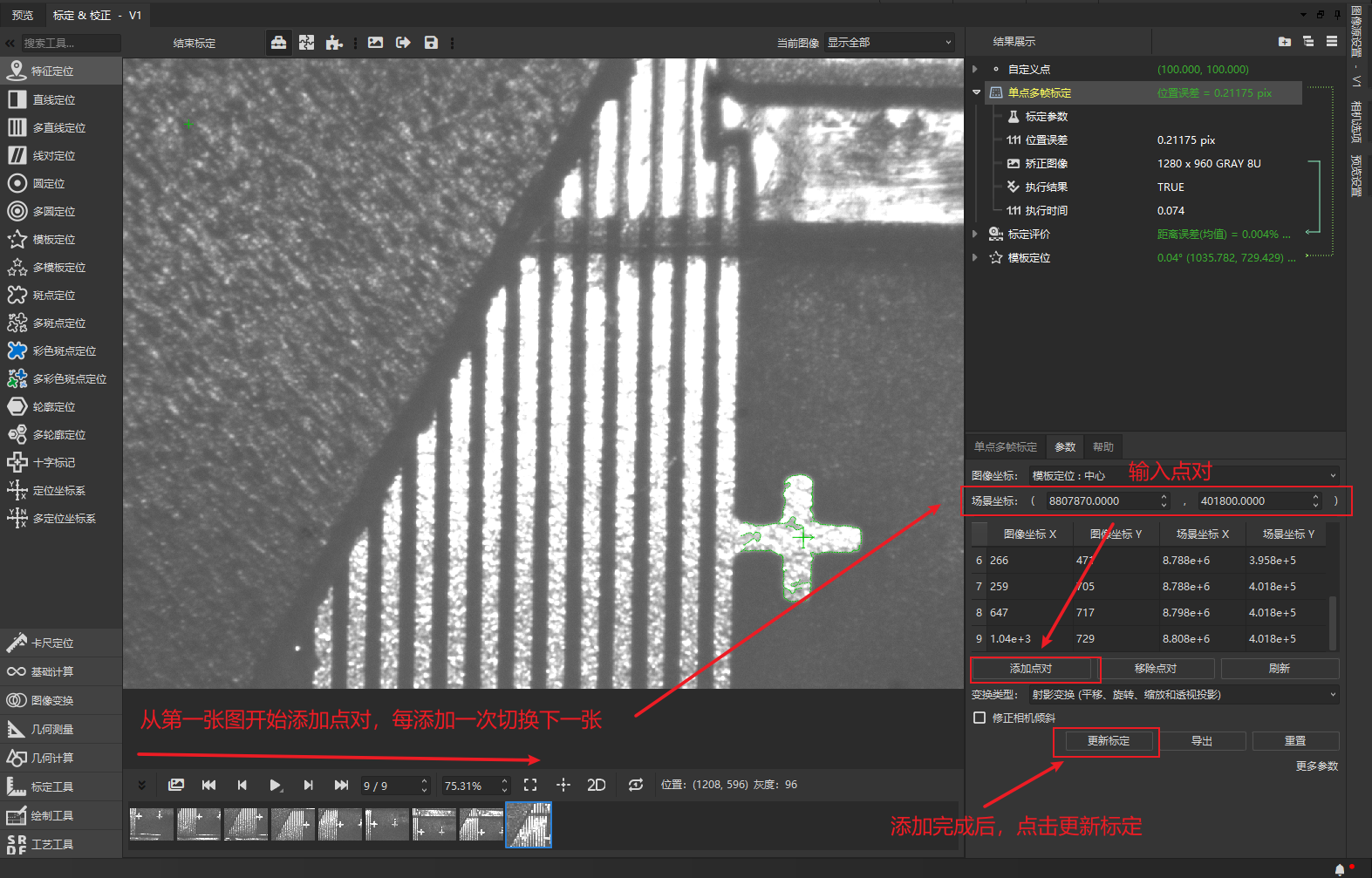
物理坐标示例¶
如图,实际物理坐标如下:
(8787870, 389800), (8797870, 389800), (8807870, 389800),
(8807870, 395800), (8797870, 395800), (8787870, 395800),
(8787870, 401800), (8797870, 401800), (8807870, 401800)
添加点对(注意图片顺序,一般来说按照运动轨迹顺序采集的图片就可以使用),输入对应的物理坐标,点击标定完成标定。
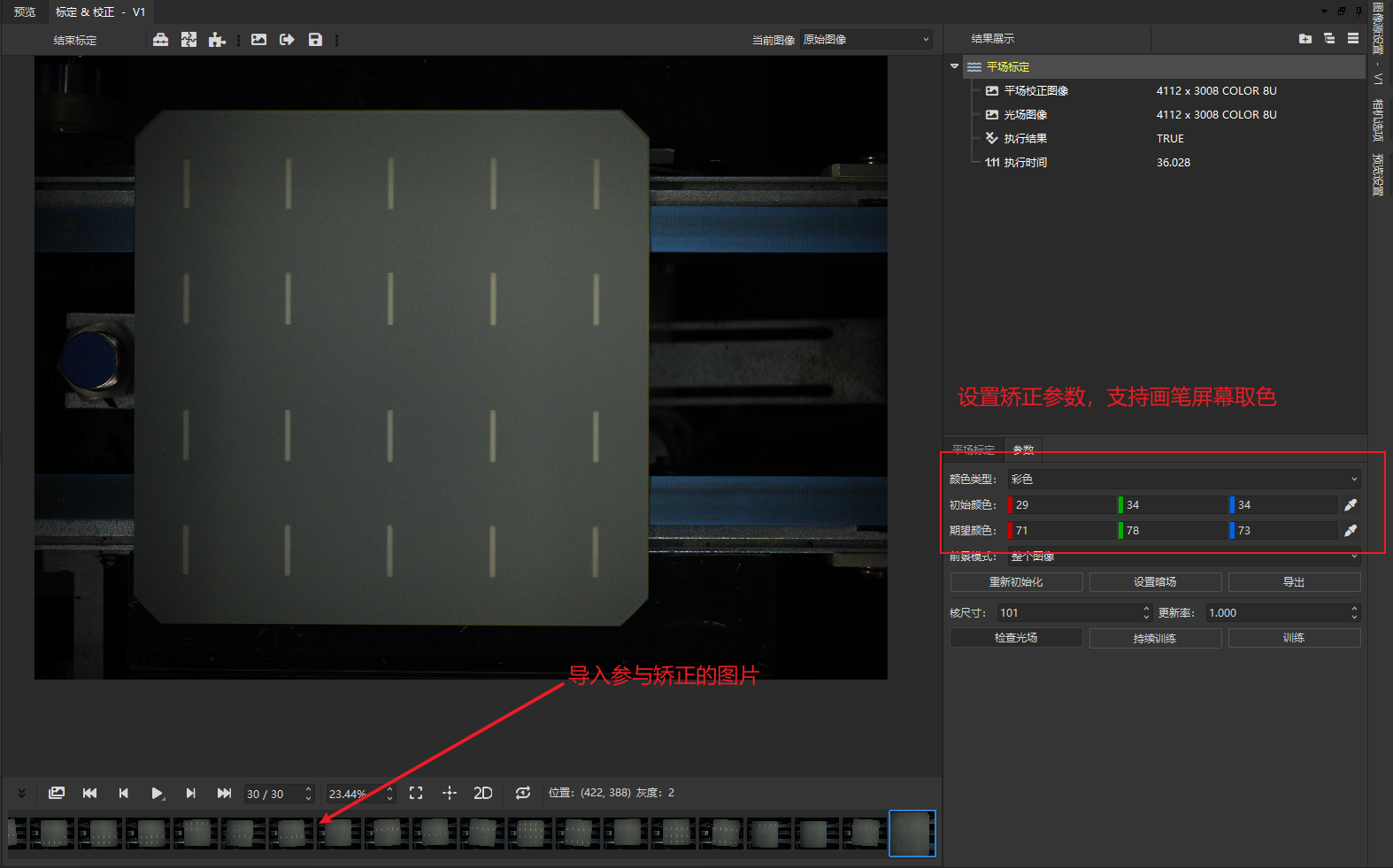
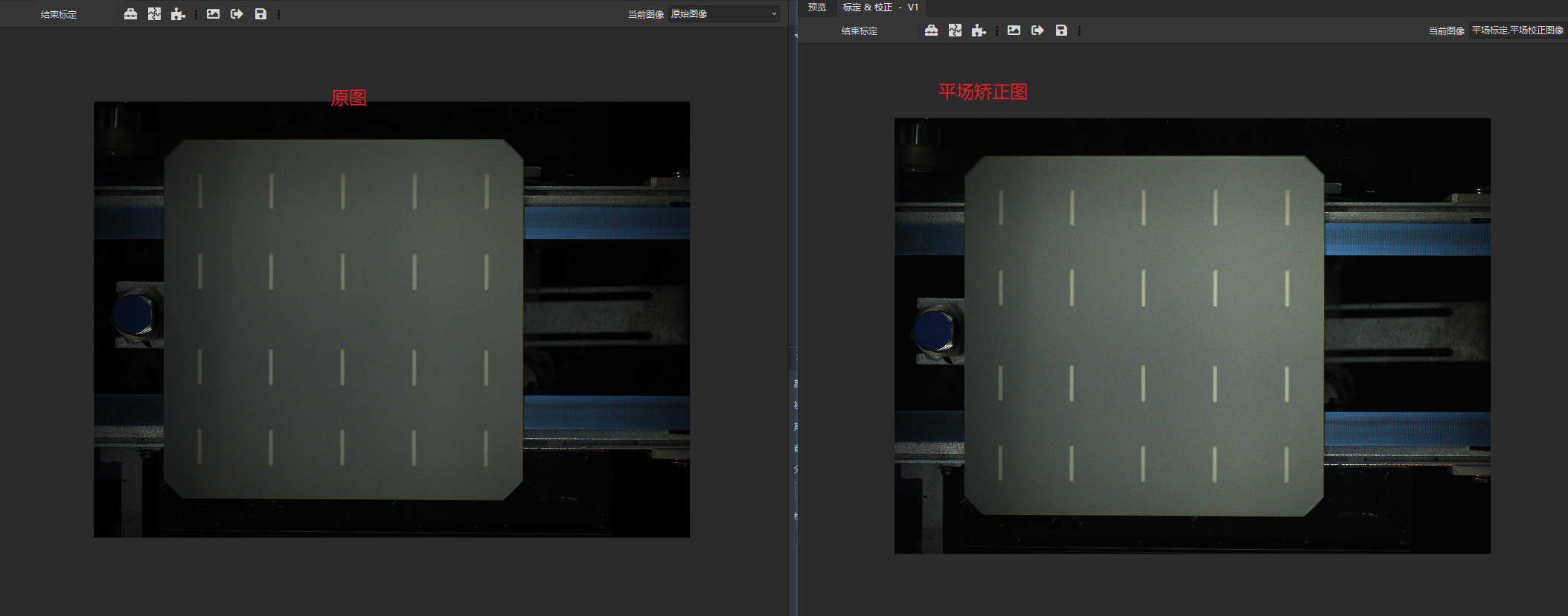
平场标定¶
平场矫正通过采集图像每个像素点上待补偿物体的亮度,计算得到光场强度的实际分布和各个像素的补偿系数。该矫正主要用于光照不均匀且缓慢变化的场景,典型的如下图中光照亮度中间高两边低的情况。
效果图如下:
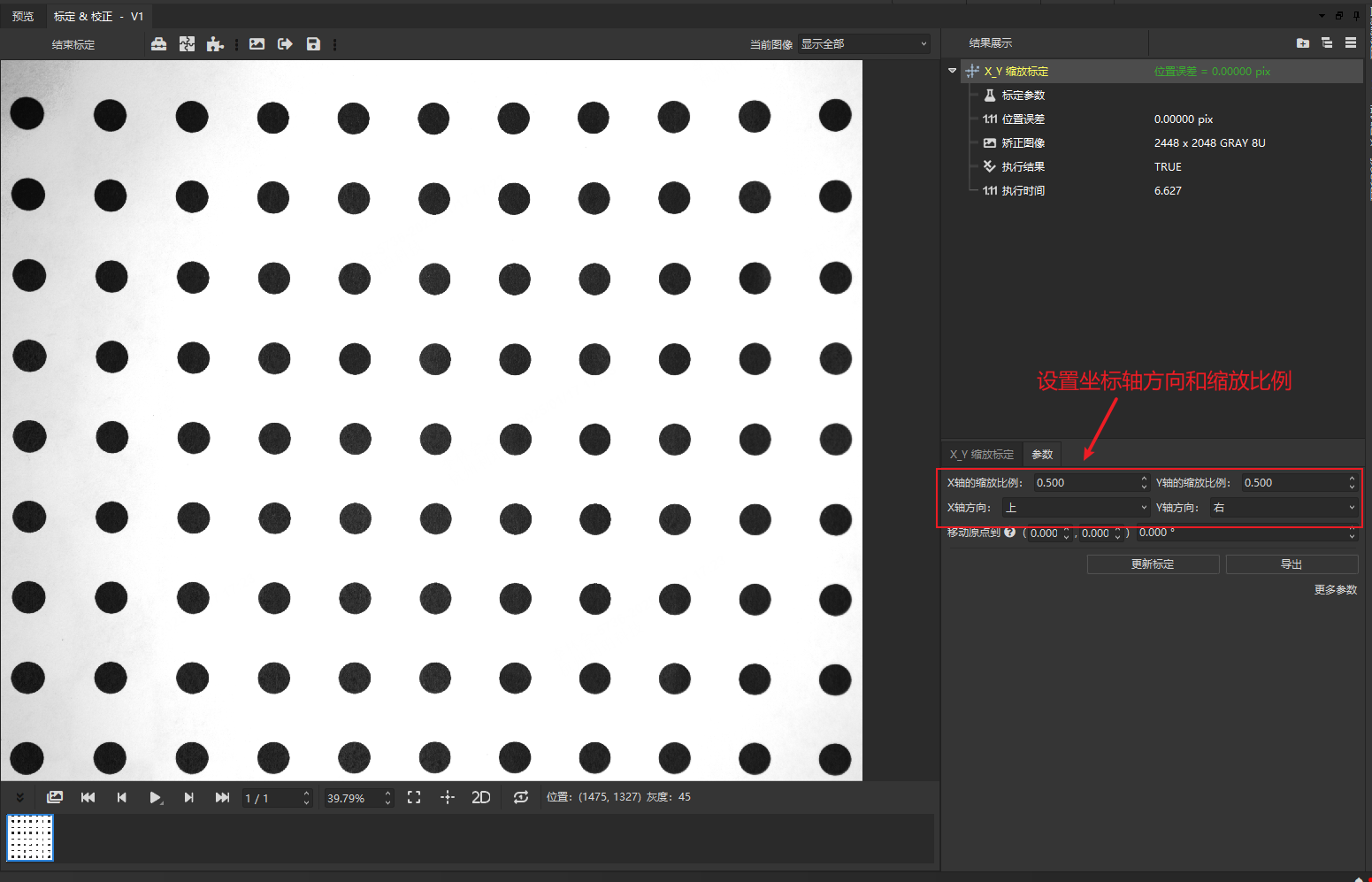
X/Y 缩放标定¶
缩放标定可以指定坐标轴方向和缩放比例。完成标定后,最终输出的图像物理坐标会缩放为其像素坐标的倍数,其图像大小不会发生变化。
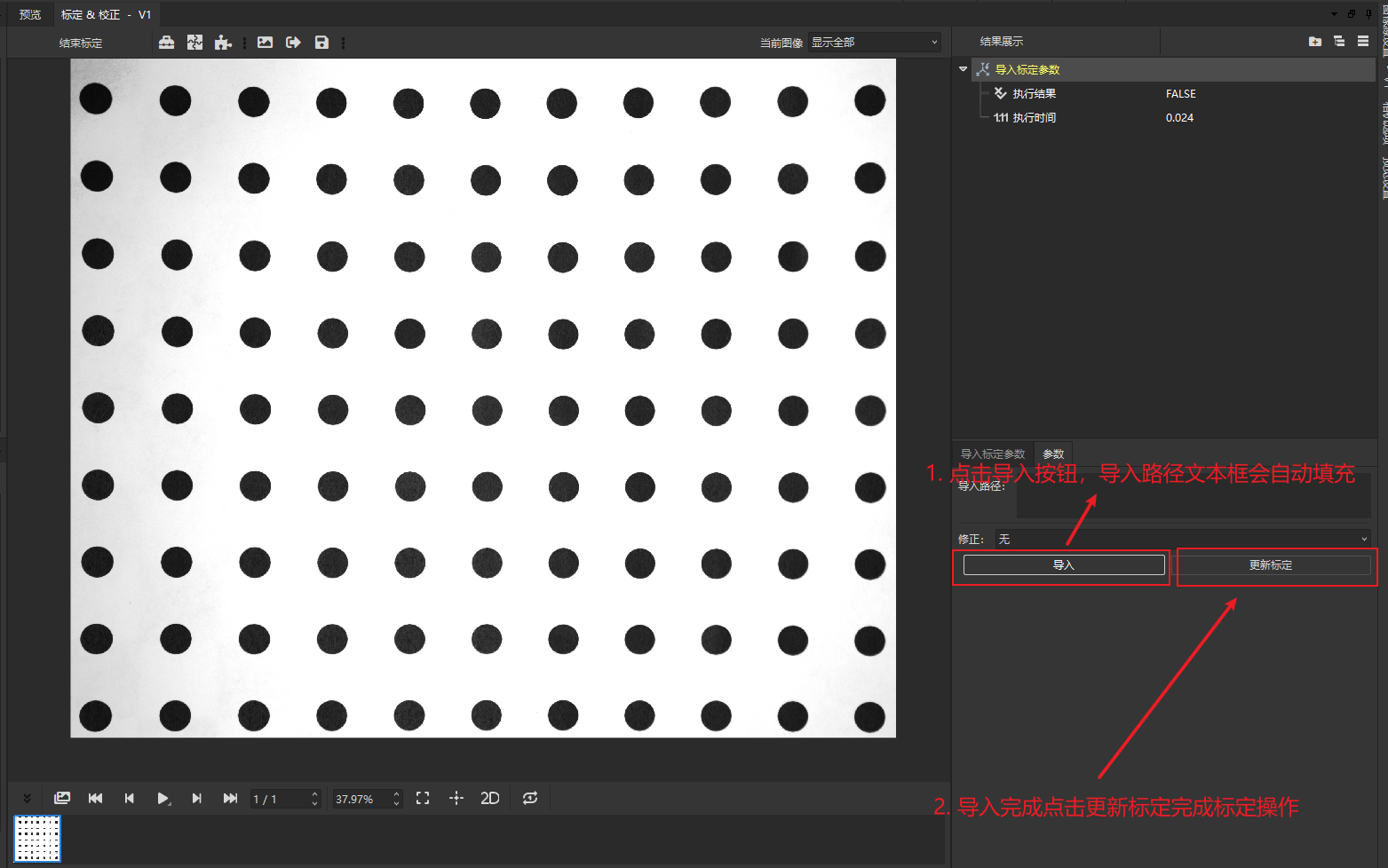
导入标定参数¶
导入标定文件可以直接进行标定(前提:本地有保存标定文件)。通常用于项目迁移情况较多,可以直接导入已经做好的标定文件,导入完成后更新标定即可完成。
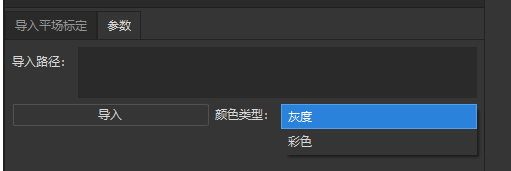
导入平场标定的操作和导入标定文件一致,需要注意选择颜色类型(需要根据图片选择合适的类型)。
旋转标定¶
旋转标定 - 单视野¶
导入需要标定的图片(图片运动按运动轨迹顺序),配置模板,添加收集工具,收集点的运动轨迹(收集工具中打开"合并为单个对象",可以输出轮廓)。
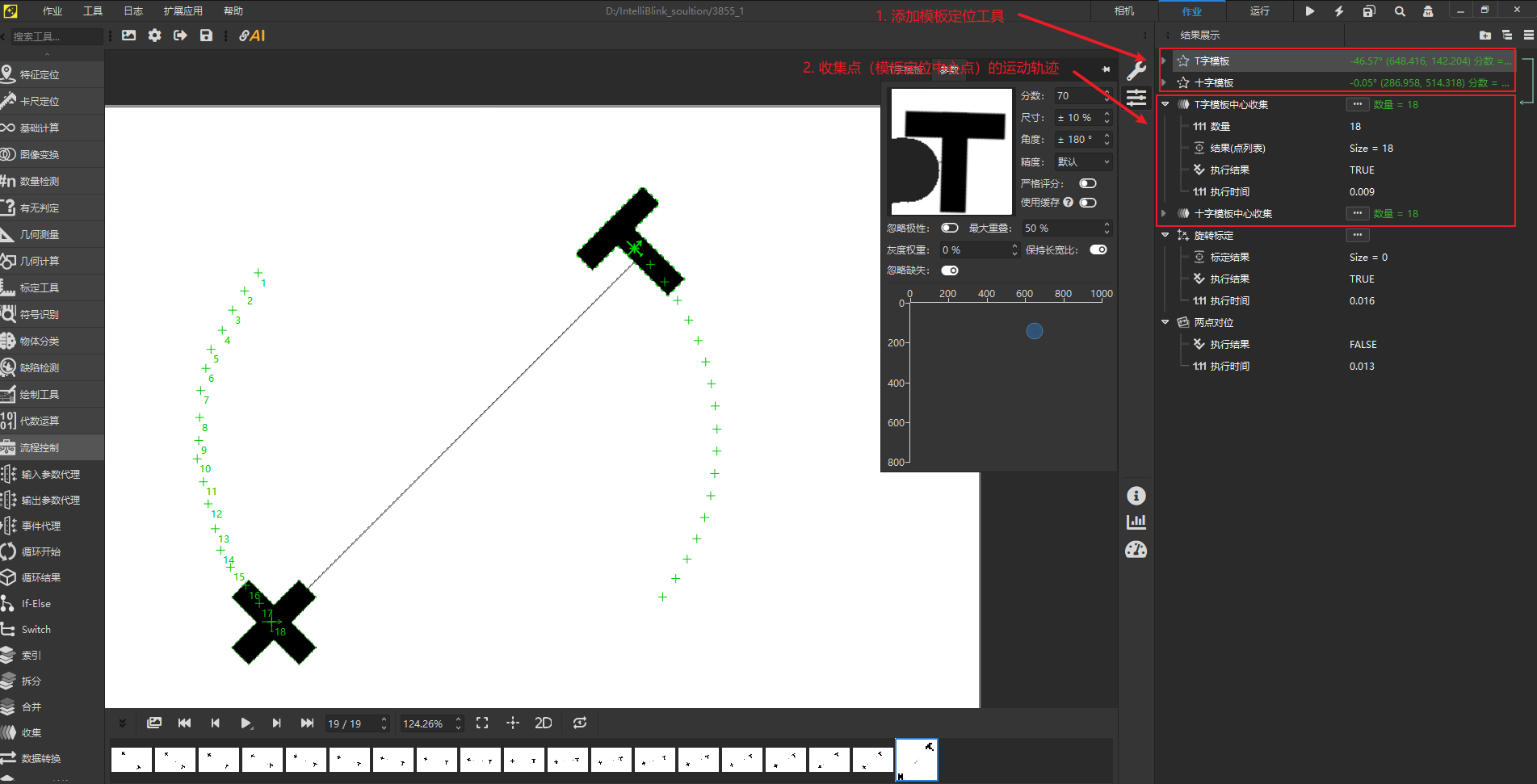
添加旋转标定算法工具:
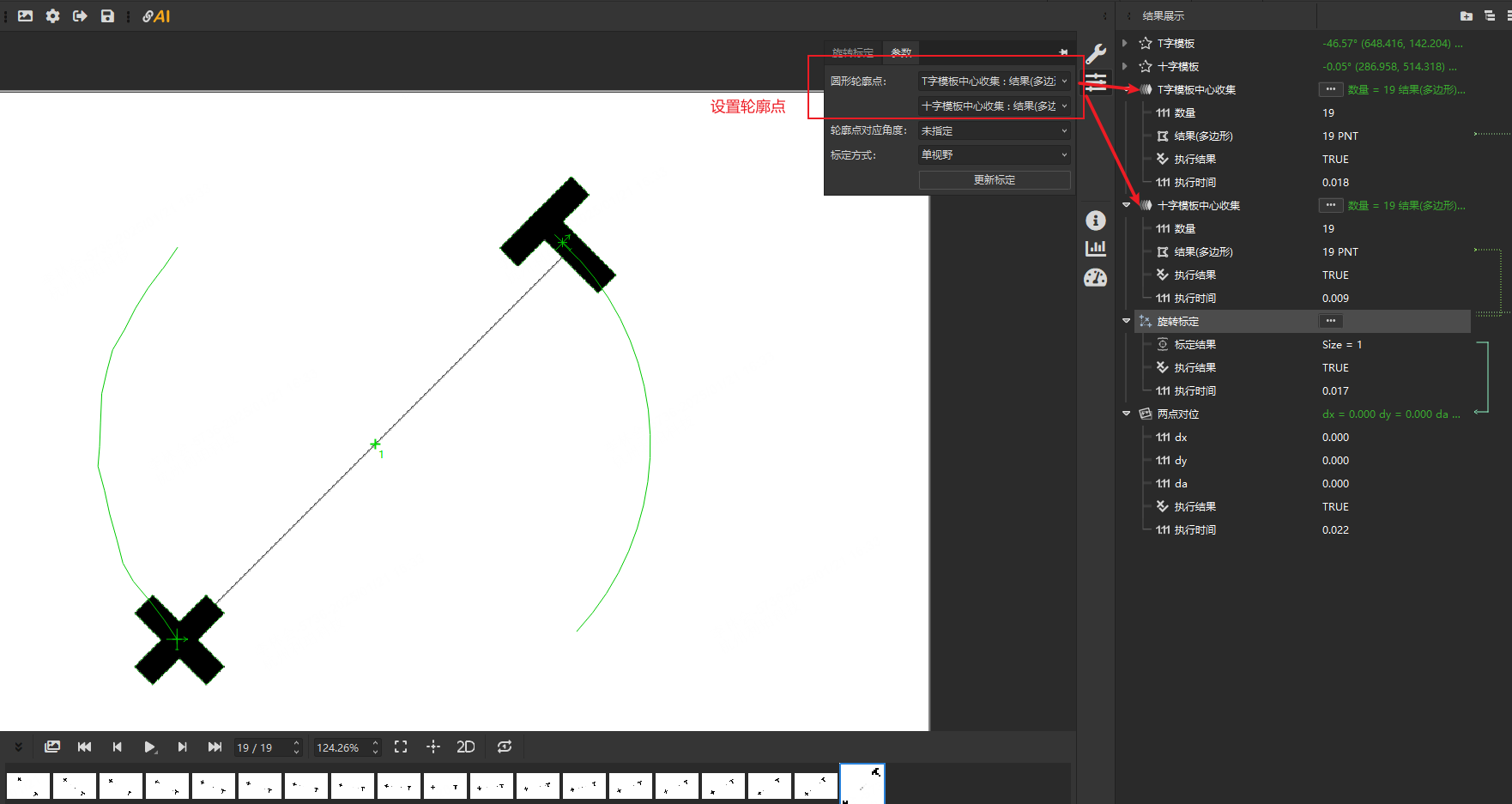
以上标定成功。
旋转标定 - 双视野¶
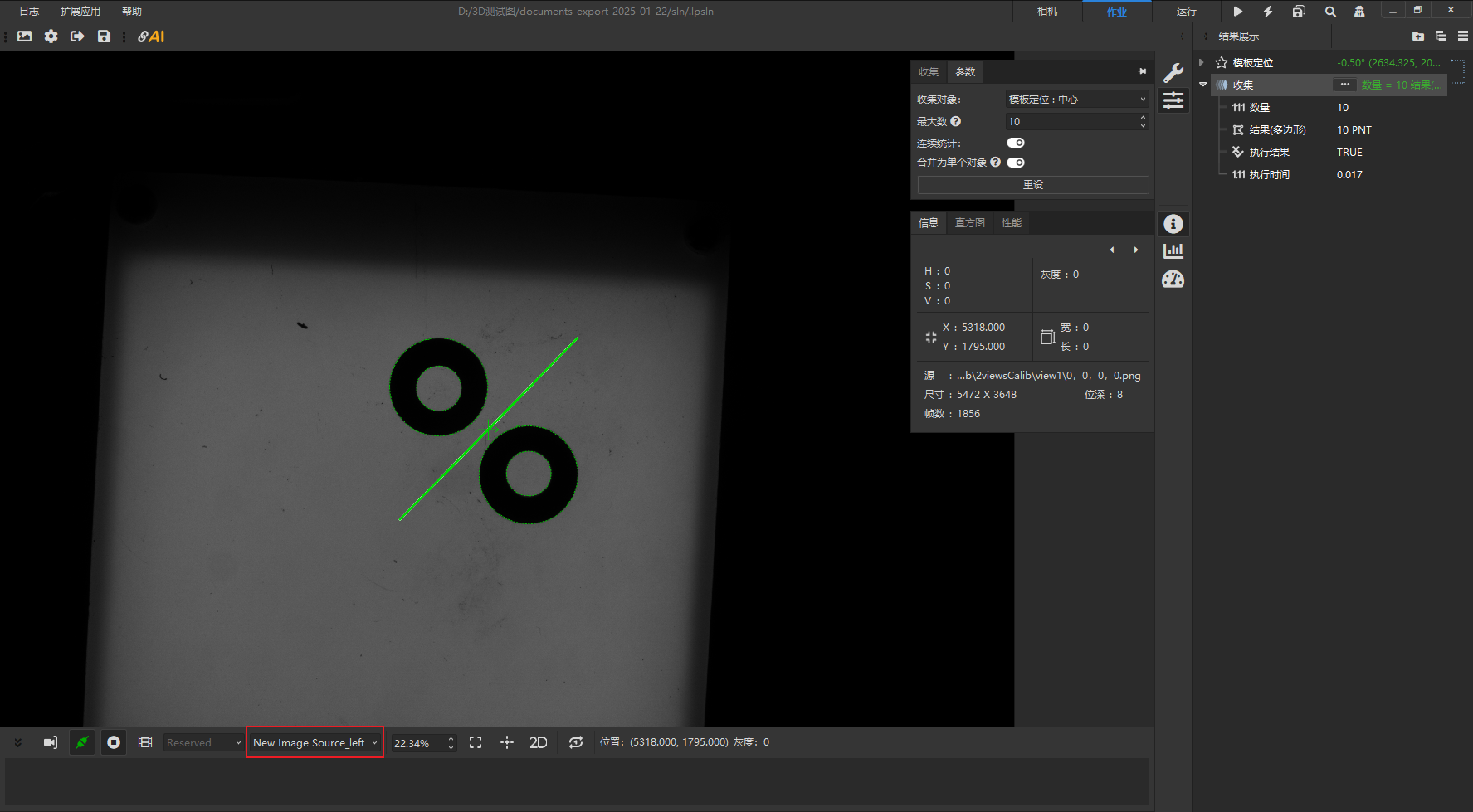
创建双目图像源,并绑定左右相机,将图像源_左相机和图像源右_相机分别绑定在作业中。在左侧视野中配置模板定位算法和收集算法(收集点数据,输出多边形)。
在右侧视野中做相同配置,并添加旋转标定算法,选择双视野:
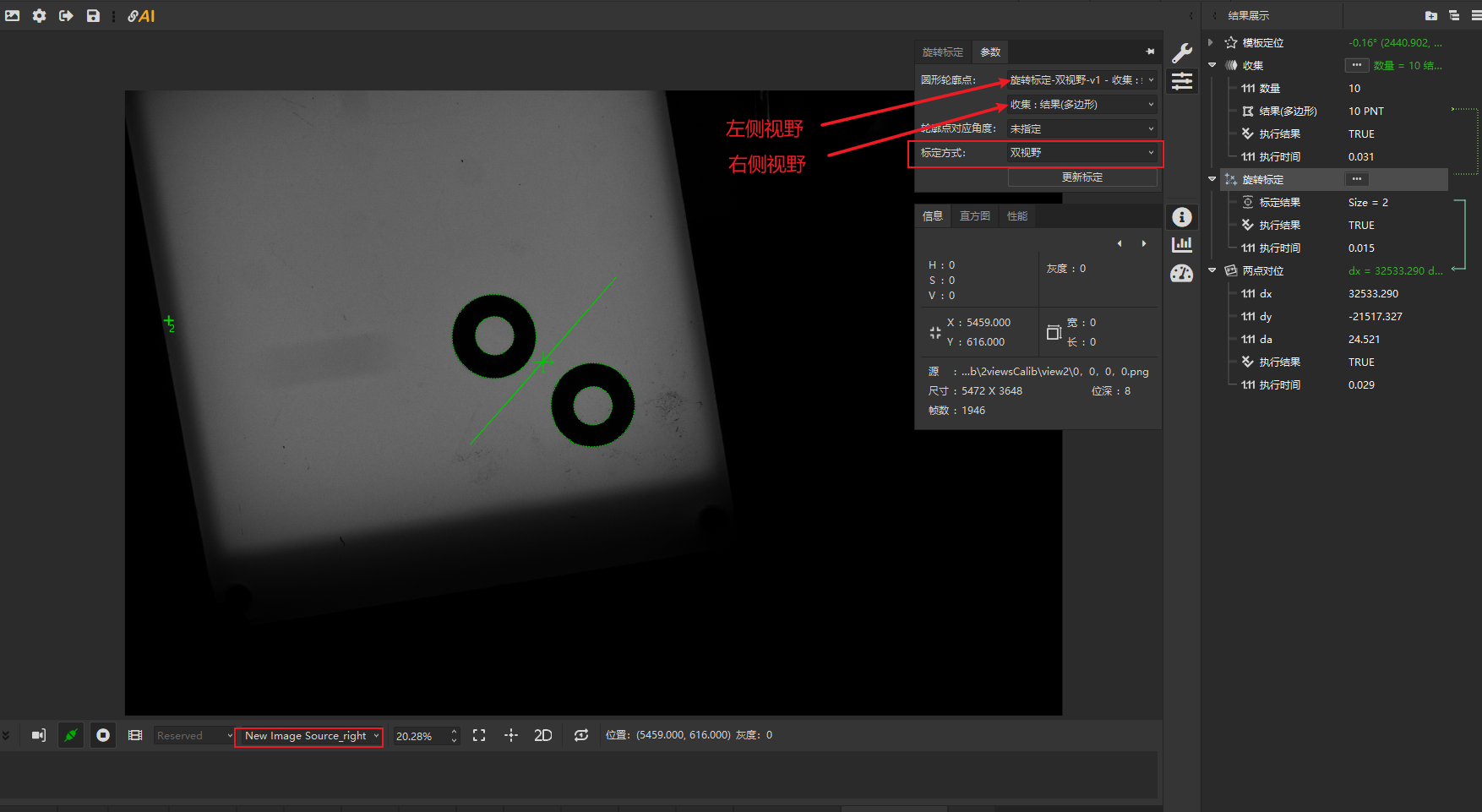
添加两点对位算法工具,设置相机模式为双相机,将旋转标定的结果作为标定基准,设置两个相机的基准点和目标点,即可输出 dx、dy、dα。
